

-
Product Center
-
3D deformation measurement


-
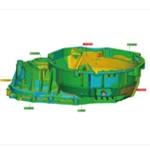
3D industrial inspection



Photogrammetry
-
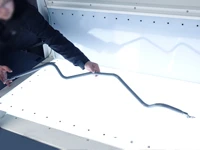
Tube inspection

Tube measurement system
-
-
Software Platform
-
Application Software

3D deformation strain measurement
-
Vision Development Platform

3D Measurement SDK
-
- Solutions
-
- Cases
- Accessories
- Service
- About Us
















圖像")
散斑匹配方法原理示意圖")

測量dic相機安裝方案")
用于機翼變形測量試驗平臺")
用于機翼變形測量精度情況")




